I came upon the paper Water-indexed benefits and impacts of California almonds, and wanted more visualizations to understand the absolutes, not just a ranking. I was also interested in the total nutritional value as the resource instead of market value.
See more images, full code, and raw data extracted from their supplemental PDF in this GitHub repo.
Further work may include graphing with respect to recommended daily value or including Kilocalories in the dataset.
Designing my lighting environment for mental wellbeing and subconscious separation of activities.
Lighting design is spatial and temporal. Throughout my day I employ different color temperatures at different lighting sources around my living and working environment.
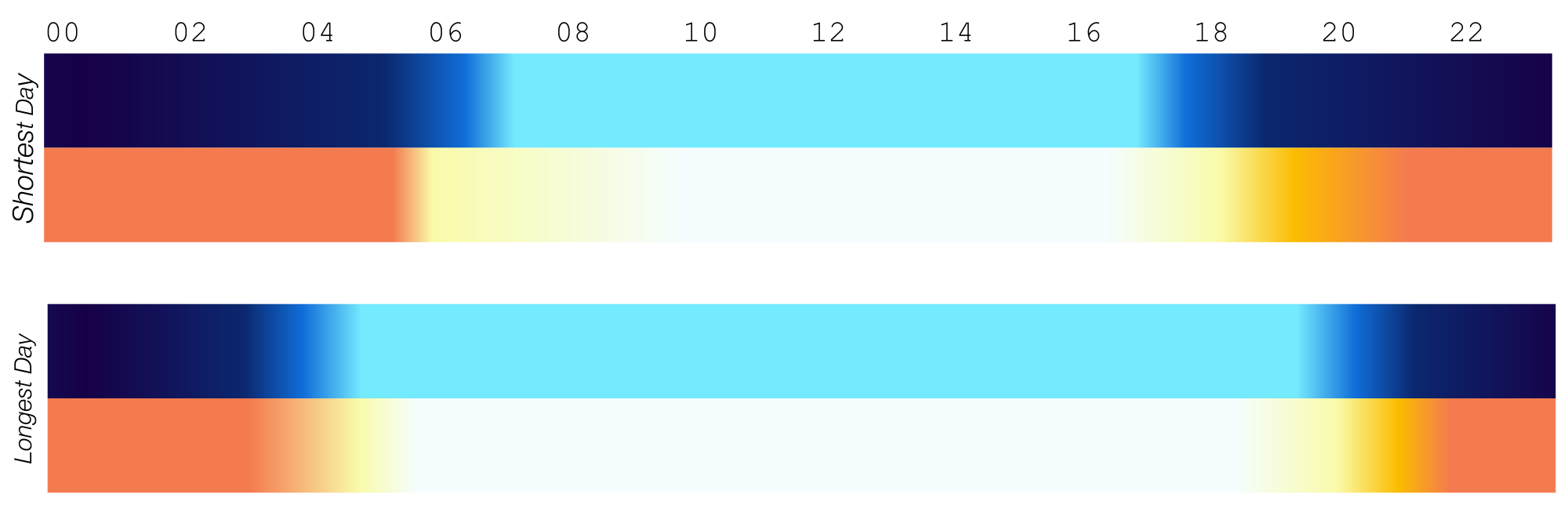
Sun versus my indoor lighting throughout the day.
Wakeup
I am able to awake with natural sun light. The blinds are usually closed but sunlight still gets through. Once conscious and out of bed, I rotate the vertical blinds to an open position. The window is on the west, so the sunrise and early daylight is diffuse.
When I cannot rise to the sunrise, be it appointment or schedule, I first turn on a bedside lamp to a warm white (~3000K ), then the half-covered brighter soft white (~4000K ) disk ceiling fixture over the course of a few minutes as I get dressed.
Morning
Mornings involve simply opening the east facing vertical blinds and letting the sunlight pour in. On the rare cloudy day, I may use a soft white corner desk lamp for a few hours before the next transition.
Late Morning to Early Afternoon
On work-from-home mornings and early afternoons, I turn on a 4 foot(122 cm) long daylight (6500 K ) diffused LED fixture that I have stuffed into the “head jamb” of the window. This maintains the illusion of sunlight in my desk area once the sun passes overhead; especially during the winter season. I often find that it completely tricks my brain when I look outside and see a dark cloudy day.
When I’m off or it’s the peak of summer, I may or may not use the daylight strip. I think of it as my “productivity light”.
Late afternoon
When I feel that the work day’s end is in an hour or so, I turn off my “sunlight simulator” and turn on a similarly colored, but slightly lower temperature ceiling light in the kitchen (if it’s not on already). The source from several meters behind me smooths the room’s illuminance. As sunset begins, the soft white table lamp turns on too.
Evening
The light in the kitchen provides a smooth transition to making dinner if it is dark outside. The next lighting change is a 2 meter floor lamp with a tall amber (< 2400K ) bulb sitting in an inverted conical shade for diffusion off the ceiling. It starts at full brightness, then I slowly bring the tabletop dimmer it to it’s minimum as my evening progresses. And eventually, off. The soft white table lamp is turned off with the first dim of the floor lamp.
Night
Amber nightlights , all placed below chest level and some further dimmed with tape, provide very subtle light around the flat during sleep time. No lights are on in the bedroom.
Computers and Transitions
My various computer screens have some version of time-based blue removing color shift enabled.
Nothing about this lighting design is computerized, everything is on some kind of standard mechanical switch. It would be neat to automate these transitions, but the times of the transitions often are based on season, cloud cover, and personal feeling. The manual strategy is simple and flexible.
Outdoors
A surrounding environment without outdoor light trespass is important. See the following for information about light pollution. Luckily, it’s fix provides instantaneous benefit.
A story is not about the characters, it is about the characters in the world: how they experience it, and how they affect it.
The episodes of a serialized television series tell small stories that act as the needles, weaving threads of substance and existence all around and throughout the program.
This essay is an exploration of how, when done well, episodic storytelling is brilliantly unique.
From an open ended networking course project during the spring semester of 2017, I wrote a paper describing (in part) a multi-user communication protocol for dealing with the long delays and for providing a high-level interface for multi-team scientific control and data transfer. With the help of one of my professors, Dr.Kanwal Gagneja, it has been published in the Proceedings of MobiSecServ 2018 – a part of IEEE Xplore Digital Library. It was a small conference (no more than 25 people). On February 25 I presented the paper in Miami, FL.
I’m very happy to have it published and contribute a small amount to the conversation of how near-future people will be using extraterrestrial computer networks. There are some things I’d probably adjust a year later, though I am proud of the work, had a fun time writing it, and have tremendous gratitude toward Dr.Gagnegja for making this happen.
Abstract
This paper presents a high-level networking design to provide high bandwidth for a young and growing Mars settlement and science station. A physical network topology is described consisting of a high power ground station to communicate with orbiters. Different parts and devices of the station are connected with network infrastructure. Some examples are given for various non-obvious use cases of the network.
Additionally, an upper level networking protocol is described to handle reliable communication between planets. This Transplanetary Data Mailing Protocol (TDMP) operates three processes working together: a database of retrievable files and user inbox files; a ‘parcel’ structure for data to be contained; and parcel piece fragmenting for asynchronous pipelined transmission and loss handling. Together, these systems allow ease of connection between people, scientists, and experiments.
Trimmed audio (silences removed) of the talk recorded from my pocket:
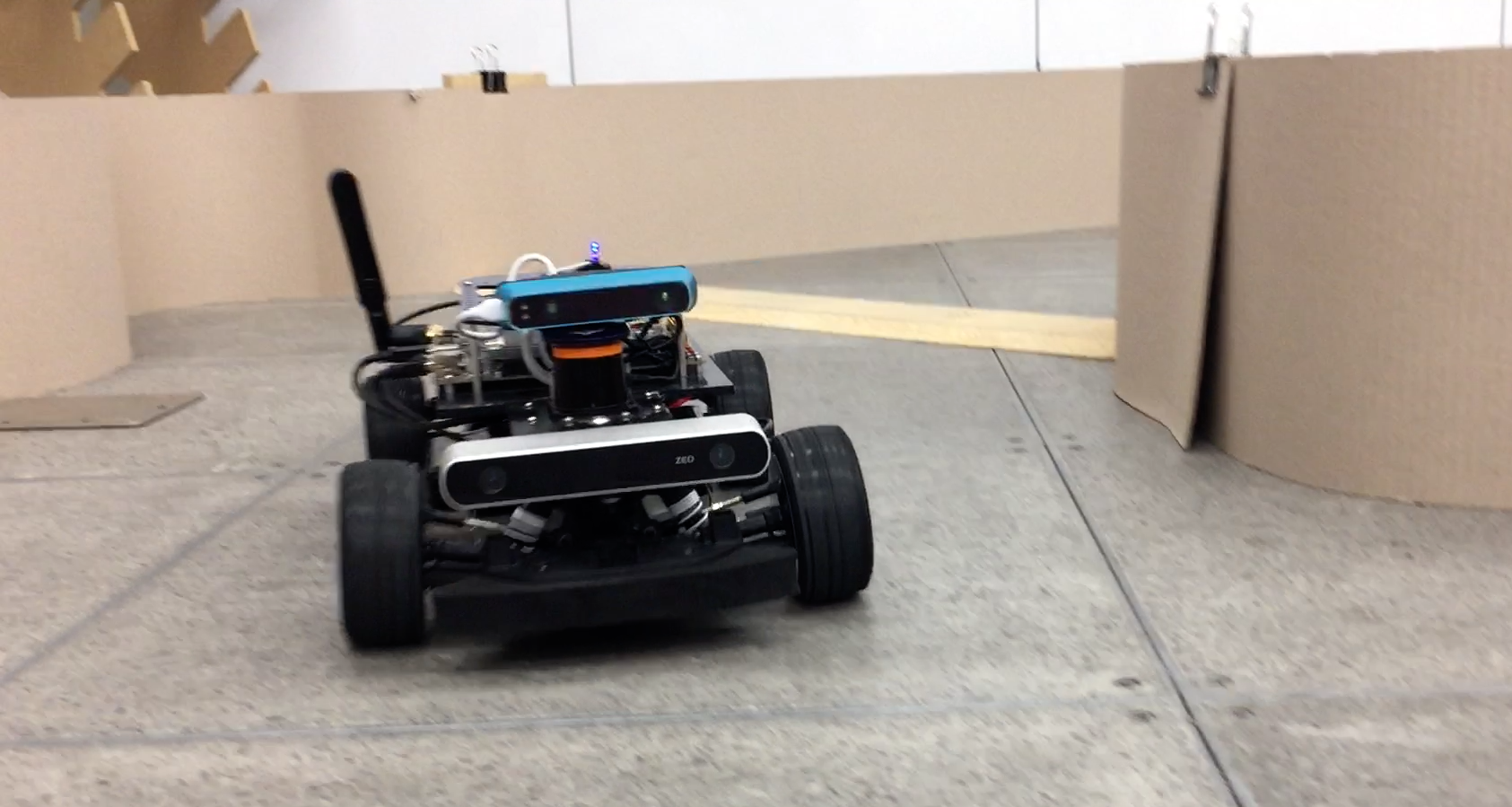
I was part of the inaugural Autonomous Vehicle class started by Dr.Dean Bushey at FL Polytechnic based off MIT’s down-scale R.A.C.E.C.A.R.
It was an essentially independent study where three teams of students would work though milestone labs. I was the head programmer of my team. A few of us students also gave talks and demos to outside groups. I gave a 30 minute introduction to autonomous vehicle workshop at PolyHacks 2017. This one of the most fun and exciting courses/projects I’ve been a part of.
The cars have a TX1 computer running ROS along with a variety of sensors. After building the car on a stripped down RC chassis, we started with basic lane/wall following using the LiDAR – “stay middle” as I called it. We then continued to visual servoing and shape detection with the ZED color stereo camera, mapping, localization, and finally path finding. The course concluded with a final ‘engineering brief’ and demonstration from each team.
All code written and used at various points is in this git repo. It also includes a course log that I started putting together due to limited practical documentation of getting started with each of the milestones.
I recorded many videos of our progress though the semester and edited them into a single video (below). I also cut that down further into an additional one minute summary video. My team’s car is the one with blue camera ‘nose’.
I’ve had this idea for a while and the introduction of new apis (such as voice recognition) in iOS 10 I went ahead and made this app: Quick Voice Memo.
I had a thought, I looked it up, and it did not exist (as a tld), until now. I am the proud owner of PicturesOfPeopleTaking.Pictures. It is exactly that. Pictures, of people, taking pictures. It is also open for public submissions. It uses Django as a backend and built on a Bootstrap front-end.

{kind=link}